Generative Music with IMU data
For this project I wanted to explore the use of IMU motion data for techniques associated with generative music practices, such as those often found in Eurorack and audio programming. Brian Eno defines this practice generally as the creation of a system which automatically creates musical parts based on rules and sensibilities set by the musician. The musician the therefore designer and curator over the system, rather than being directly responsible for creating the musical ideas.
Here, eight processes/techniques were emulated in Pure Data and their parameters opened to IMU motion data. These are listed below. There is also a performance video of myself using all eight processes in a complete system.
For control, the IMU sensor used was the one built into my smartphone. It was then attached to my wrist using an armband normally intended for runners. I chose to attach the sensor to the wrist due to high range of potential movement afforded by that placement.
Step Sequencer Pitch - Mapped to MIDI note number on the selected step Roll - Chooses the step to be edited by pitch Yaw - Number of notes in the connected Euclidean sequencer, allowing for a unified sequencing environment.
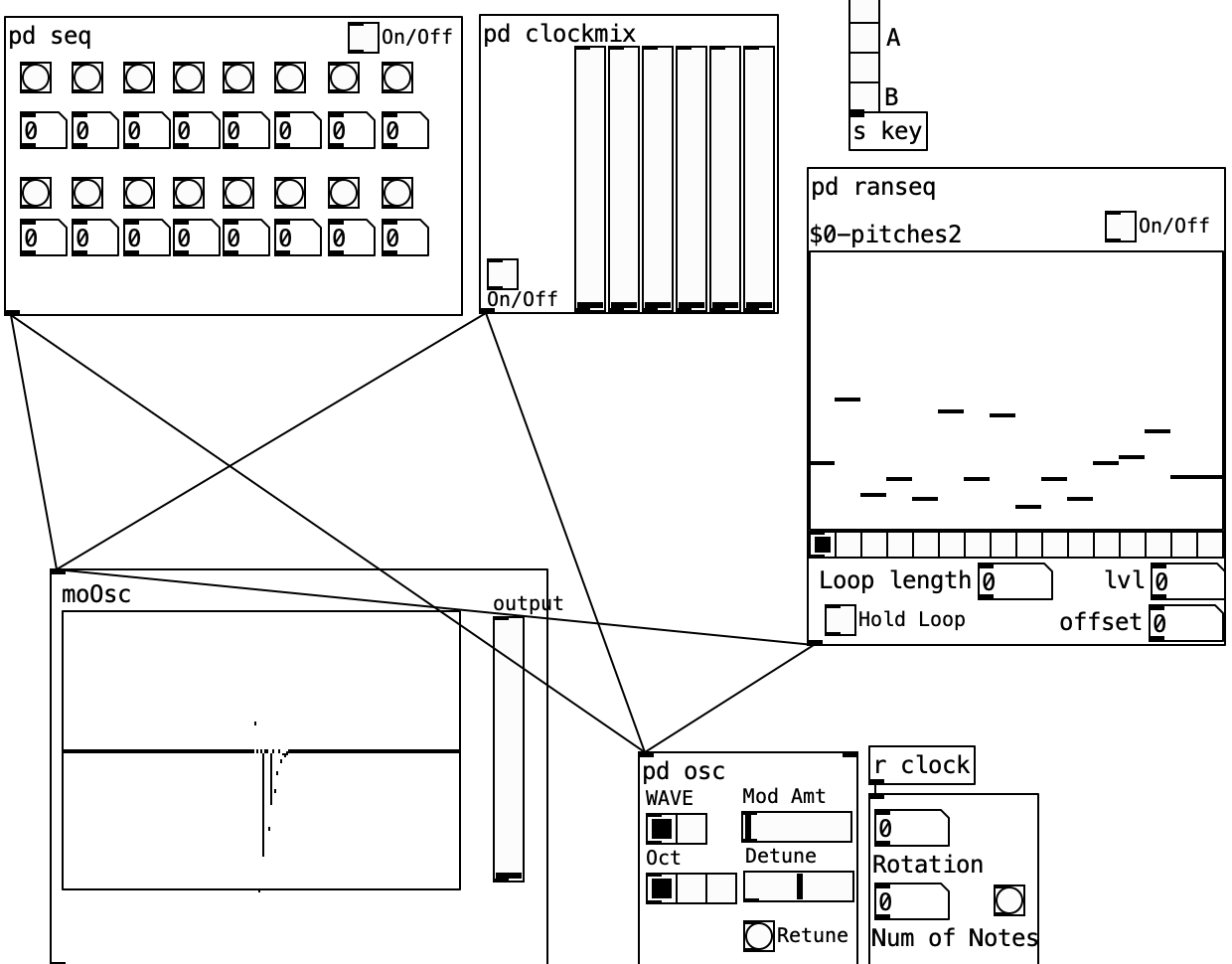
Random Sequencer Pitch - Mapped to “lvl”, control over the highest possible MIDI value generated Roll - Mapped to “loop length” Yaw - Mapped to “offset”, control over the lowest possible MIDI value generated
Clock Division Mixer Pitch - Mapped to 1/8 clock division Roll - Mapped to 1/4 clock division Yaw - Mapped to 1/6 clock division X acceleration - Mapped to 1/2 clock division Y acceleration - Mapped to 1/3 clock division Z acceleration - Mapped to 1/1 clock division
Euclidean Sequencer Pitch - Mapped to the number of notes/triggers Roll - Mapped to “rotation” or timing offset Yaw - Mapped to total number of steps in thee sequence
Euclidean Drum Sequencer Pitch - Mapped to number of kick drum triggers and the length of sequence. Roll - Mapped to number of closed hi-hat triggers and the rotation of the kick triggers. Yaw - Mapped to number off open hi-hat triggers, closed hi-hat rotation and closed hat sequence length.
Arpeggiator Pitch - Mapped to the number of notes in the arpeggio Roll - Mapped to the MIDI note number of the arpeggio’s root note. Yaw - Mapped to arpeggio “direction”, up, down or up and down.
Motion Generative Wavetable Pitch - Mapped to select which value in the wavetable to change. This value changed also triggers normalisation of the wavetable. Roll, Yaw, X, Y, Z acceleration - All fed in to write to the wavetable array.